May
2026
One paper accepted to SIGGRAPH 2026 .
Dec
2025
Two papers accepted to CVPR 2026 . One paper accepted to 3DV 2026 .
Nov
2025
Our general whole-body control framework SONIC released on arXiv. Code and models coming soon!
Jun
2025
Three papers accepted to ICCV 2025 . See you in Hawaii!
Feb
2025
Two papers accepted to CVPR 2025 .
Feb
2024
Two papers accepted to CVPR 2024 .
July
2023
Two papers accepted to ICCV 2023 . See you in Paris!
Mar
2023
One paper on learning digital tennis player from videos accepted to SIGGRAPH 2023 (Best Paper Honorable Mention) .
Feb
2023
One paper on simulating pedestrian motions accepted to CVPR 2023 .
Sep
2022
One paper on embodied human pose estimation accepted to NeurIPS 2022 .
May
2022
Joined NVIDIA Research as a Research Scientist.
Apr
2022
Defended my Ph.D. thesis Unified Simulation, Perception, and Generation of Human Behavior .
Mar
2022
One paper on global human mesh recovery accepted to CVPR 2022 with an Oral Presentation .
Jan
2022
One paper on efficient automatic agent design accepted to ICLR 2022 with an Oral Presentation .
Jan
2022
Invited Talk at MPI Perceiving Systems .
Sep
2021
One paper on kinematics-guided control accepted to NeurIPS 2021 .
July
2021
One paper on multi-agent forecasting accepted to ICCV 2021 .
May
2021
Starting my internship at NVIDIA AI.
Apr
2021
Invited Talk at ETH Zurich, Computer Vision and Learning Group.
Apr
2021
Invited Talk at "Machine Learning and Optimal Control" class, University of Alabama.
Mar
2021
Received an outstanding reviewer award by ICLR 2021 .
Feb
2021
One paper on physically-plausible human pose estimation accepted to CVRP 2021 with an Oral Presentation .
Feb
2021
One paper accepted to ICRA 2021 .
Feb
2021
Invited Talk at 16th CSL student conference .
Feb
2021
Invited Talk at UIUC Robotics Seminar.
Dec
2020
Invited Talks at Qualcomm and Wayve.
Dec
2020
Honored to receive 2021 NVIDIA Graduate Fellowship .
Sep
2020
One paper on Residual Force Control accepted to NeurIPS 2020 .
Aug
2020
Honored to receive 2020 Qualcomm Innovation Fellowship .
July
2020
Two papers accepted to ECCV 2020 .
May
2020
Starting my internship at Facebook Reality Lab Pittsburgh.
Feb
2020
Two papers accepted to CVPR 2020 , one with an Oral Presentation .
Dec
2019
Paper Diverse Trajectory Forecasting with Determinantal Point Processes accepted to ICLR 2020 .
July
2019
Paper Ego-Pose Estimation and Forecasting as Real-Time PD Control accepted to ICCV 2019 .
July
2018
Paper 3D Ego-Pose Estimation via Imitation Learning accepted to ECCV 2018 .
Your browser does not support the video tag.
GRAIL: Generating Humanoid Loco-Manipulation from 3D Assets and Video Priors
Tianyi Xie *,
Haotian Zhang *,
Jinhyung Park *,
Zi Wang *,
Bowen Wen ,
Jiefeng Li ,
Xueting Li ,
Qingwei Ben ,
Haoyang Weng ,
Yufei Ye ,
David Minor ,
Tingwu Wang ,
Chenfanfu Jiang ,
Sanja Fidler ,
Jan Kautz ,
Linxi "Jim" Fan ,
Yuke Zhu ,
Zhengyi Luo †,
Umar Iqbal †,
Ye Yuan † (*Co-First Authors, †Project Leads)
arXiv , 2026
Your browser does not support the video tag.
MotionBricks: Scalable Real-Time Motions with Modular Latent Generative Model and Smart Primitives
Tingwu Wang ,
Olivier Dionne,
Michael De Ruyter ,
David Minor ,
Davis Rempe ,
Kaifeng Zhao,
Mathis Petrovich ,
Ye Yuan ,
Chenran Li ,
Zhengyi Luo ,
Brian Robison,
Xavier Blackwell,
Bernardo Antoniazzi,
Xue Bin Peng ,
Yuke Zhu ,
Simon Yuen
SIGGRAPH , 2026
Your browser does not support the video tag.
Kimodo: Scaling Controllable Human Motion Generation
Davis Rempe *,
Mathis Petrovich *,
Ye Yuan ,
Haotian Zhang ,
Xue Bin Peng ,
Yifeng Jiang ,
Tingwu Wang ,
Umar Iqbal ,
David Minor ,
Michael de Ruyter ,
Jiefeng Li ,
Chen Tessler ,
Edy Lim,
Eugene Jeong,
Sam Wu,
Ehsan Hassani,
Michael Huang,
Jin-Bey Yu,
Chaeyeon Chung,
Lina Song,
Olivier Dionne,
Jan Kautz ,
Simon Yuen ,
Sanja Fidler (*Equal Contribution)
arXiv , 2026
Your browser does not support the video tag.
CHIP: Adaptive Compliance for Humanoid Control through Hindsight Perturbation
Sirui Chen *,
Zi-Ang Cao *,
Zhengyi Luo ,
Fernando Castañeda ,
Chenran Li ,
Tingwu Wang ,
Ye Yuan ,
Linxi "Jim" Fan ,
C. Karen Liu †,
Yuke Zhu † (*Equal Contribution, †Project Leads)
arXiv , 2025
Your browser does not support the video tag.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Zhengyi Luo †,
Ye Yuan †,
Tingwu Wang †,
Chenran Li †,
Sirui Chen *,
Fernando Castañeda *,
Zi-Ang Cao *,
Jiefeng Li *,
David Minor *,
Qingwei Ben *,
Xingye Da *,
Runyu Ding ,
Cyrus Hogg ,
Lina Song ,
Edy Lim ,
Eugene Jeong ,
Tairan He ,
Haoru Xue ,
Wenli Xiao ,
Zi Wang ,
Simon Yuen ,
Jan Kautz ,
Yan Chang ,
Umar Iqbal ,
Linxi "Jim" Fan ‡,
Yuke Zhu ‡ (†Co-First Authors, *Core Contributors, ‡Project Leads)
arXiv , 2025
Your browser does not support the video tag.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Tairan He *,
Zi Wang *,
Haoru Xue *,
Qingwei Ben *,
Zhengyi Luo ,
Wenli Xiao ,
Ye Yuan ,
Xingye Da ,
Fernando Castañeda ,
Shankar Sastry ,
Changliu Liu ,
Guanya Shi ,
Linxi "Jim" Fan †,
Yuke Zhu † (*Equal Contribution, †Project Leads)
CVPR , 2026
Your browser does not support the video tag.
CARI4D: Category Agnostic 4D Reconstruction of Human-Object Interaction
Xianghui Xie ,
Bowen Wen ,
Yan Chang ,
Hesam Rabeti ,
Jiefeng Li ,
Ye Yuan ,
Gerard Pons-Moll ,
Stan Birchfield
CVPR , 2026
Your browser does not support the video tag.
Dream, Lift, Animate: From Single Images to Animatable Gaussian Avatars
Marcel C. Bühler ,
Ye Yuan ,
Xueting Li ,
Yangyi Huang ,
Koki Nagano ,
Umar Iqbal
3DV , 2026
GENMO: A GENeralist Model for Human MOtion
Jiefeng Li ,
Jinkun Cao ,
Haotian Zhang ,
Davis Rempe ,
Jan Kautz ,
Umar Iqbal ,
Ye Yuan
ICCV , 2025 (Highlight)
Emergent Active Perception and Dexterity of Simulated Humanoids from Visual Reinforcement Learning
Zhengyi Luo ,
Chen Tessler ,
Toru Lin ,
Ye Yuan ,
Tairan He ,
Wenli Xiao ,
Yunrong Guo ,
Gal Chechik ,
Kris Kitani ,
Jim Fan ,
Yuke Zhu
arXiv , 2025
AdaHuman: Animatable Detailed 3D Human Generation with Compositional Multiview Diffusion
Yangyi Huang ,
Ye Yuan ,
Xueting Li ,
Jan Kautz ,
Umar Iqbal
ICCV , 2025
GeoMan: Temporally Consistent Human Geometry Estimation using Image-to-Video Diffusion
Gwanghyun Kim ,
Xueting Li ,
Ye Yuan ,
Koki Nagano ,
Tianye Li ,
Jan Kautz ,
Se Young Chun ,
Umar Iqbal
ICCV , 2025
SimAvatar: Simulation-Ready Avatars with Layered Hair and Clothing
Xueting Li ,
Ye Yuan ,
Shalini De Mello ,
Gilles Daviet ,
Jonathan Leaf ,
Miles Macklin ,
Jan Kautz ,
Umar Iqbal
CVPR , 2025
BLADE: Single-view Body Mesh Learning through Accurate Depth Estimation
Shengze Wang ,
Jiefeng Li ,
Tianye Li ,
Ye Yuan ,
Henry Fuchs ,
Koki Nagano ,
Shalini De Mello ,
Michael Stengel
CVPR , 2025
Harmon: Whole-Body Motion Generation of Humanoid Robots from Language Descriptions
Zhenyu Jiang ,
Yuqi Xie ,
Jinhan Li ,
Ye Yuan ,
Yifeng Zhu ,
Yuke Zhu
CoRL , 2024
SMPLOlympics: Sports Environments for Physically Simulated Humanoids
Zhengyi Luo ,
Jiashun Wang ,
Kangni Liu ,
Haotian Zhang ,
Chen Tessler ,
Jingbo Wang ,
Ye Yuan ,
Jinkun Cao ,
Zihui Lin ,
Fengyi Wang ,
Jessica Hodgins ,
Kris Kitani
arXiv , 2024
COIN: Control-Inpainting Diffusion Prior for Human and Camera Motion Estimation
Jiefeng Li ,
Ye Yuan ,
Davis Rempe ,
Haotian Zhang ,
Pavlo Molchanov ,
Cewu Lu ,
Jan Kautz ,
Umar Iqbal
ECCV , 2024
AGG: Amortized Generative 3D Gaussians for Single Image to 3D
Dejia Xu ,
Ye Yuan ,
Morteza Mardani ,
Sifei Liu ,
Jiaming Song ,
Zhangyang Wang ,
Arash Vahdat
TMLR , 2024
Your browser does not support the video tag.
GAvatar: Animatable 3D Gaussian Avatars with Implicit Mesh Learning
Ye Yuan ,
Xueting Li ,
Yangyi Huang ,
Shalini De Mello ,
Koki Nagano ,
Jan Kautz ,
Umar Iqbal (*Equal Contribution)
CVPR , 2024 (Highlight)
PACER+: On-Demand Pedestrian Animation Controller in Driving Scenarios
Jingbo Wang ,
Zhengyi Luo ,
Ye Yuan ,
Yixuan Li ,
Bo Dai
CVPR , 2024
Your browser does not support the video tag.
PACE: Human and Camera Motion Estimation from in-the-wild Videos
Muhammed Kocabas ,
Ye Yuan ,
Pavlo Molchanov ,
Yunrong Guo ,
Michael Black ,
Otmar Hilliges ,
Jan Kautz ,
Umar Iqbal
3DV , 2024 (Spotlight Presentation)
Your browser does not support the video tag.
PhysDiff: Physics-Guided Human Motion Diffusion Model
Ye Yuan ,
Jiaming Song ,
Umar Iqbal ,
Arash Vahdat ,
Jan Kautz
ICCV , 2023 (Oral Presentation)
Your browser does not support the video tag.
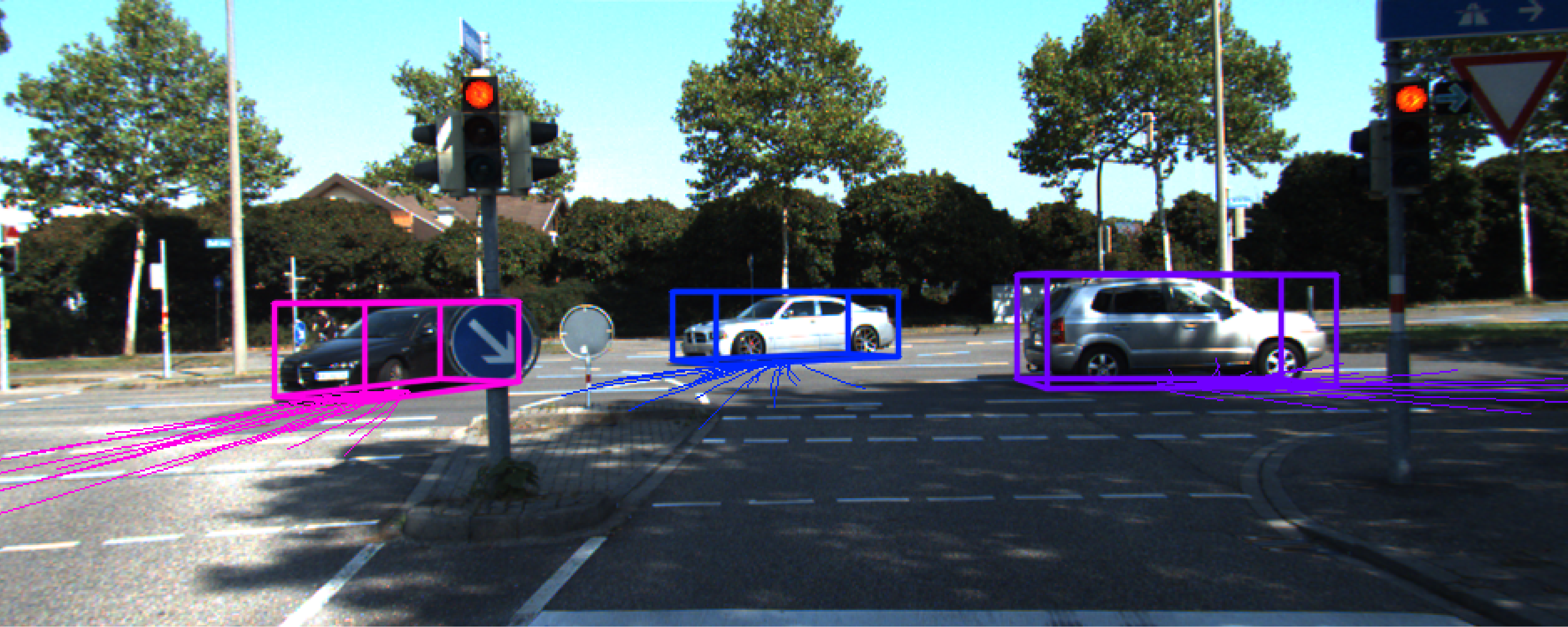
Learning Human Dynamics in Autonomous Driving Scenarios
Jingbo Wang ,
Ye Yuan ,
Zhengyi Luo ,
Kevin Xie ,
Dahua Lin ,
Umar Iqbal ,
Sanja Fidler ,
Sameh Khamis
ICCV , 2023
Your browser does not support the video tag.
Learning Physically Simulated Tennis Players from Broadcast Videos
Haotian Zhang ,
Ye Yuan ,
Viktor Makoviychuk ,
Yunrong Guo ,
Sanja Fidler ,
Xue Bin Peng ,
Kayvon Fatahalian
SIGGRAPH , 2023 (Best Paper Honorable Mention)
Your browser does not support the video tag.
Trace and Pace: Controllable Pedestrian Animation via Guided Trajectory Diffusion
Davis Rempe ,
Zhengyi Luo ,
Xue Bin Peng ,
Ye Yuan ,
Kris Kitani ,
Sanja Fidler ,
Or Litany
CVPR , 2023
RGB-Only Reconstruction of Tabletop Scenes for Collision-Free Manipulator Control
Zhenggang Tang ,
Balakumar Sundaralingam ,
Jonathan Tremblay ,
Bowen Wen ,
Ye Yuan ,
Stephen Tyree ,
Charles Loop ,
Alexander Schwing ,
Stan Birchfield
ICRA , 2023
Your browser does not support the video tag.
Embodied Scene-aware Human Pose Estimation
Zhengyi Luo ,
Shun Iwase ,
Ye Yuan ,
Kris Kitani
NeurIPS , 2022
Unified Simulation, Perception, and Generation of Human Behavior
Ye Yuan
Ph.D. Thesis, Robotics Institute, CMU, 2022
Your browser does not support the video tag.
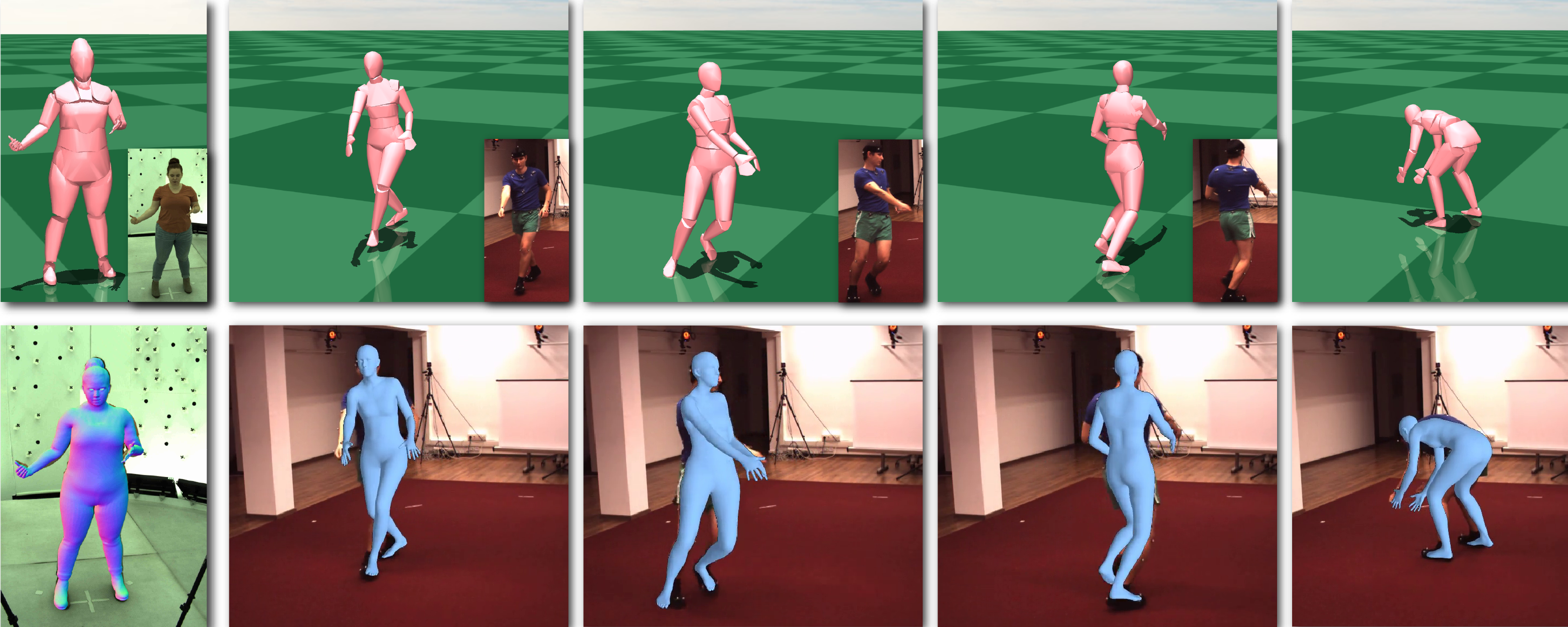
GLAMR: Global Occlusion-Aware Human Mesh Recovery with Dynamic Cameras
Ye Yuan ,
Umar Iqbal ,
Pavlo Molchanov ,
Kris Kitani ,
Jan Kautz
CVPR , 2022 (Oral Presentation - Top 4.2%)
Your browser does not support the video tag.
Transform2Act: Learning a Transform-and-Control Policy for Efficient Agent Design
Ye Yuan ,
Yuda Song ,
Zhengyi Luo ,
Wen Sun ,
Kris Kitani
ICLR , 2022 (Oral Presentation - Top 1.6%)
Online No-regret Model-Based Meta RL for Personalized Navigation
Yuda Song ,
Ye Yuan ,
Wen Sun ,
Kris Kitani
Learning for Dynamics & Control (L4DC) , 2022
Dynamics-Regulated Kinematic Policy for Egocentric Pose Estimation
Zhengyi Luo ,
Ryo Hachiuma ,
Ye Yuan ,
Kris Kitani
NeurIPS , 2021
AgentFormer: Agent-Aware Transformers for Socio-Temporal Multi-Agent Forecasting
Ye Yuan ,
Xinshuo Weng ,
Yanglan Ou ,
Kris Kitani
ICCV , 2021
SimPoE: Simulated Character Control for 3D Human Pose Estimation
Ye Yuan ,
Shih-En Wei ,
Tomas Simon ,
Kris Kitani ,
Jason Saragih
CVPR , 2021 (Oral Presentation - Top 4.2%)
PTP: Parallelized 3D Tracking and Prediction with Graph Neural Networks and Diversity Sampling
Xinshuo Weng *,
Ye Yuan *,
Kris Kitani (*Equal Contribution)
RA-L and ICRA , 2021 (Best Student Paper Candidate < 2%)
Your browser does not support the video tag.
Residual Force Control for Agile Human Behavior Imitation and Extended Motion Synthesis
Ye Yuan ,
Kris Kitani
NeurIPS , 2020
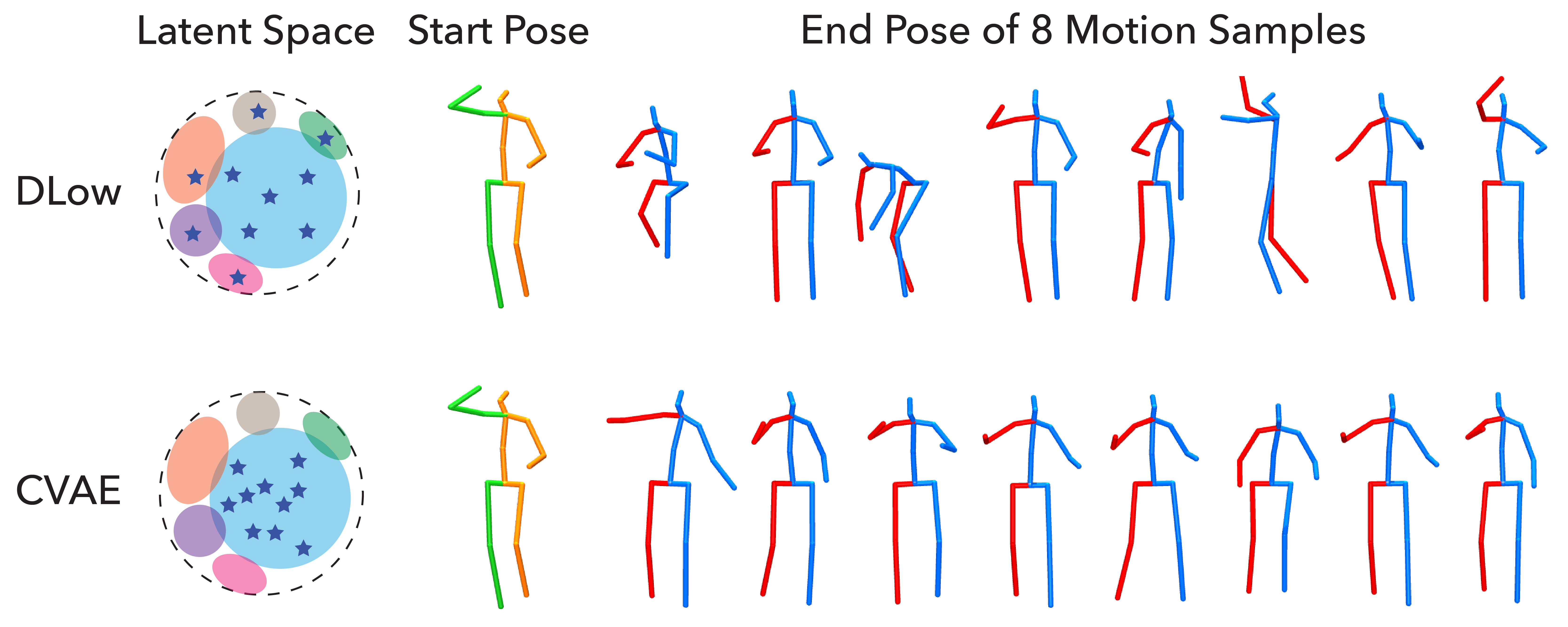
DLow: Diversifying Latent Flows for Diverse Human Motion Prediction
Ye Yuan ,
Kris Kitani
ECCV , 2020
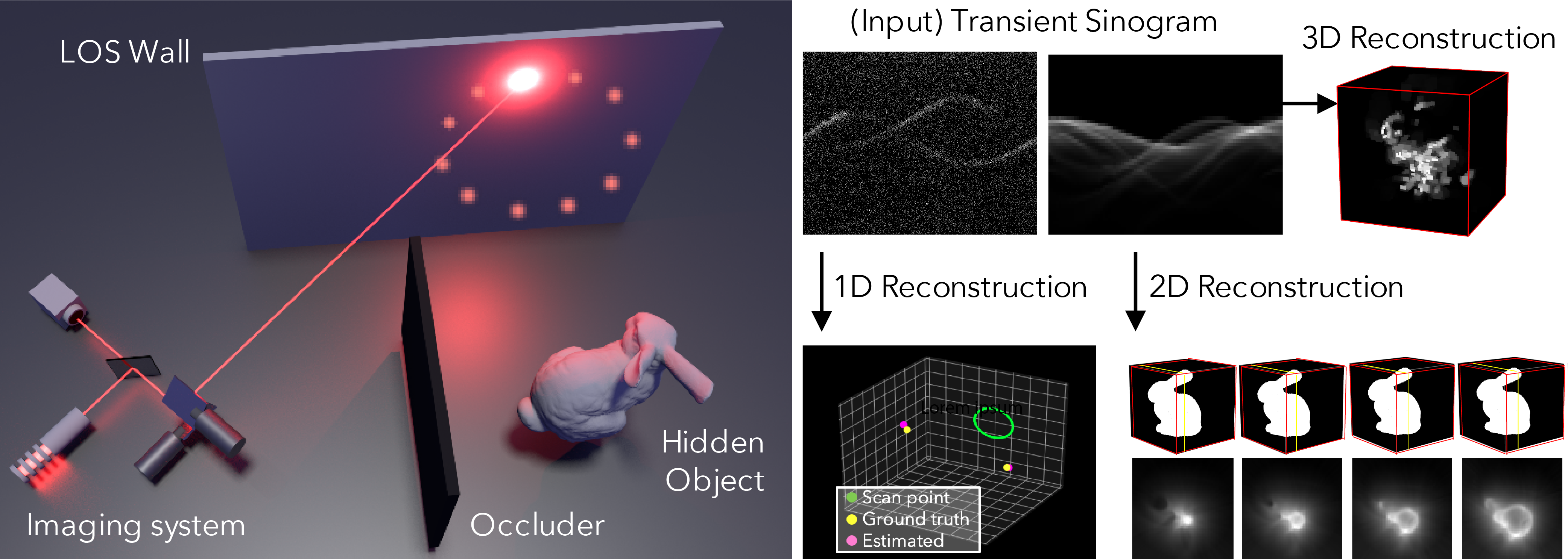
Efficient Non-Line-of-Sight Imaging from Transient Sinograms
Mariko Isogawa ,
Dorian Yao Chan ,
Ye Yuan ,
Kris Kitani ,
Matthew O'Toole
ECCV , 2020
Your browser does not support the video tag.
Diverse Trajectory Forecasting with Determinantal Point Processes
Ye Yuan ,
Kris Kitani
ICLR , 2020
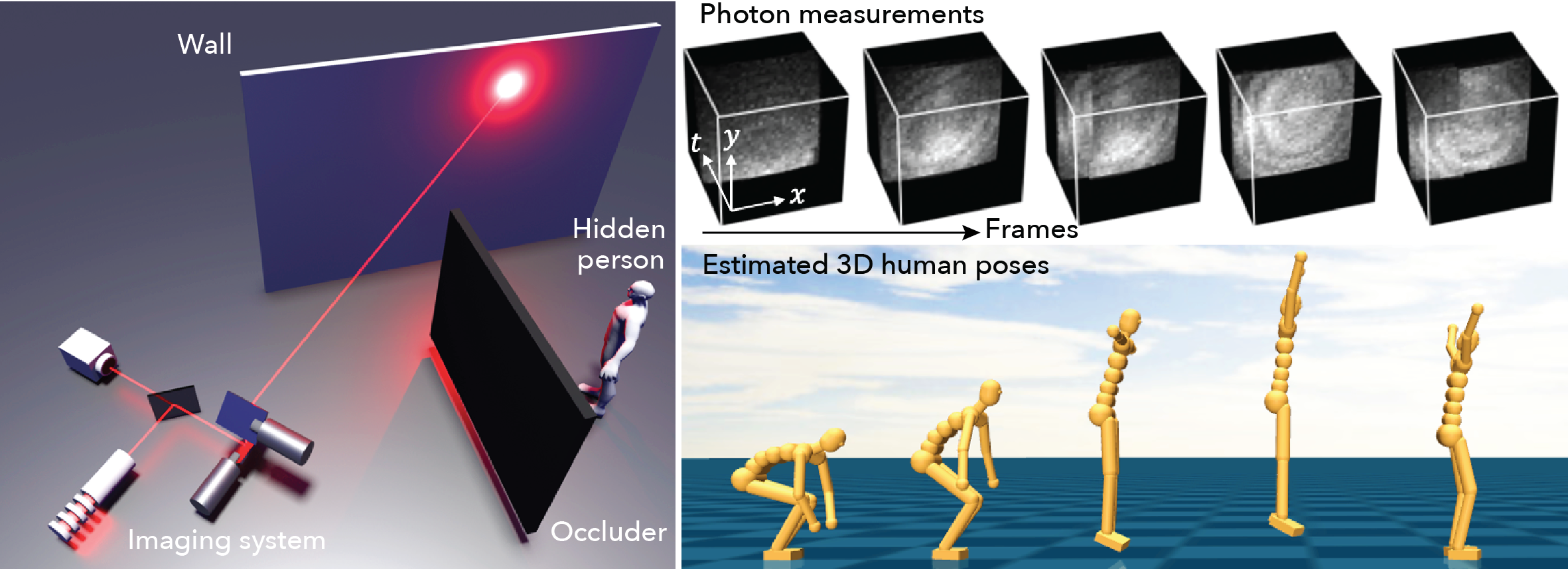
Optical Non-Line-of-Sight Physics-based 3D Human Pose Estimation
Mariko Isogawa ,
Ye Yuan ,
Matthew O'Toole ,
Kris Kitani
CVPR , 2020
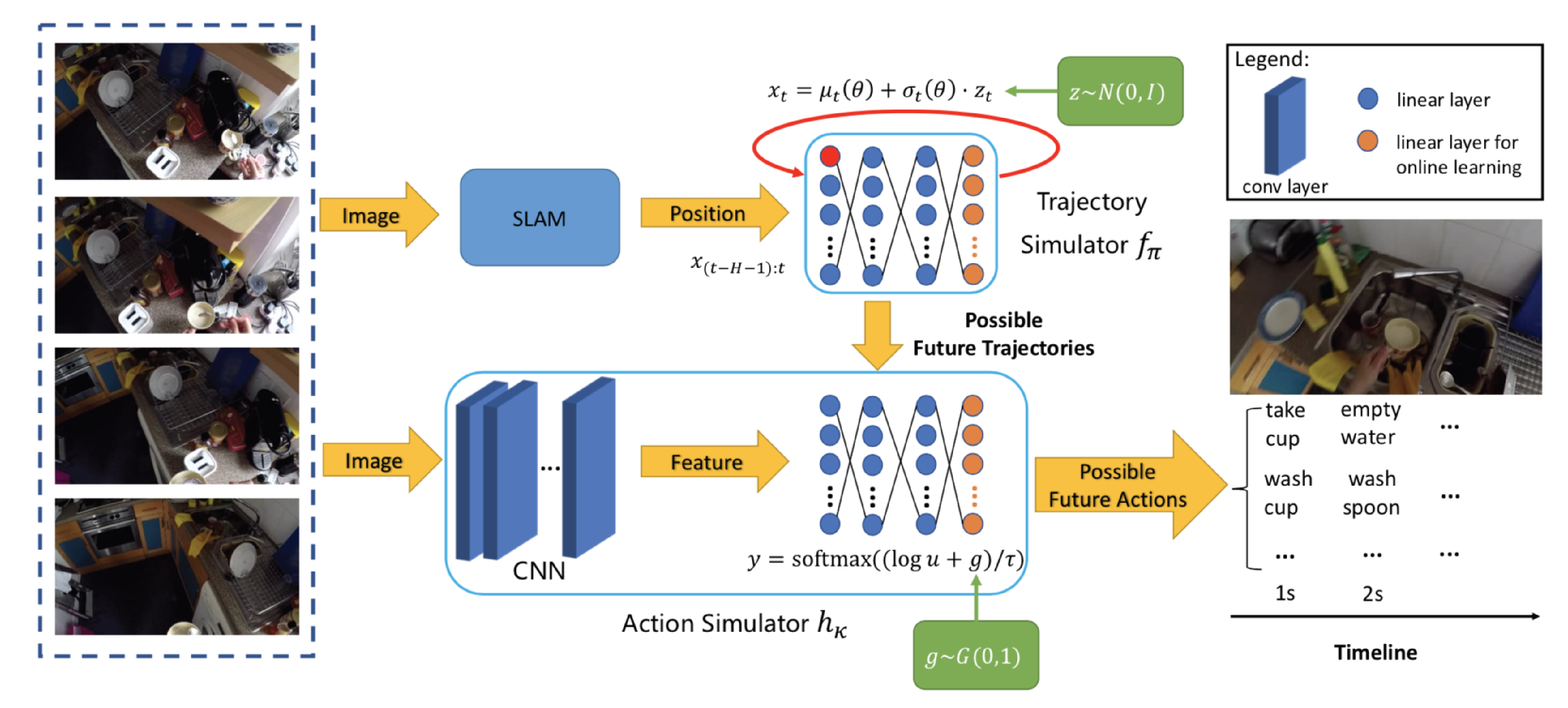
Generative Hybrid Representations for Activity Forecasting with No-Regret Learning
Jiaqi Guan ,
Ye Yuan ,
Kris Kitani ,
Nick Rhinehart
CVPR , 2020 (Oral Presentation - Top 5.7%)
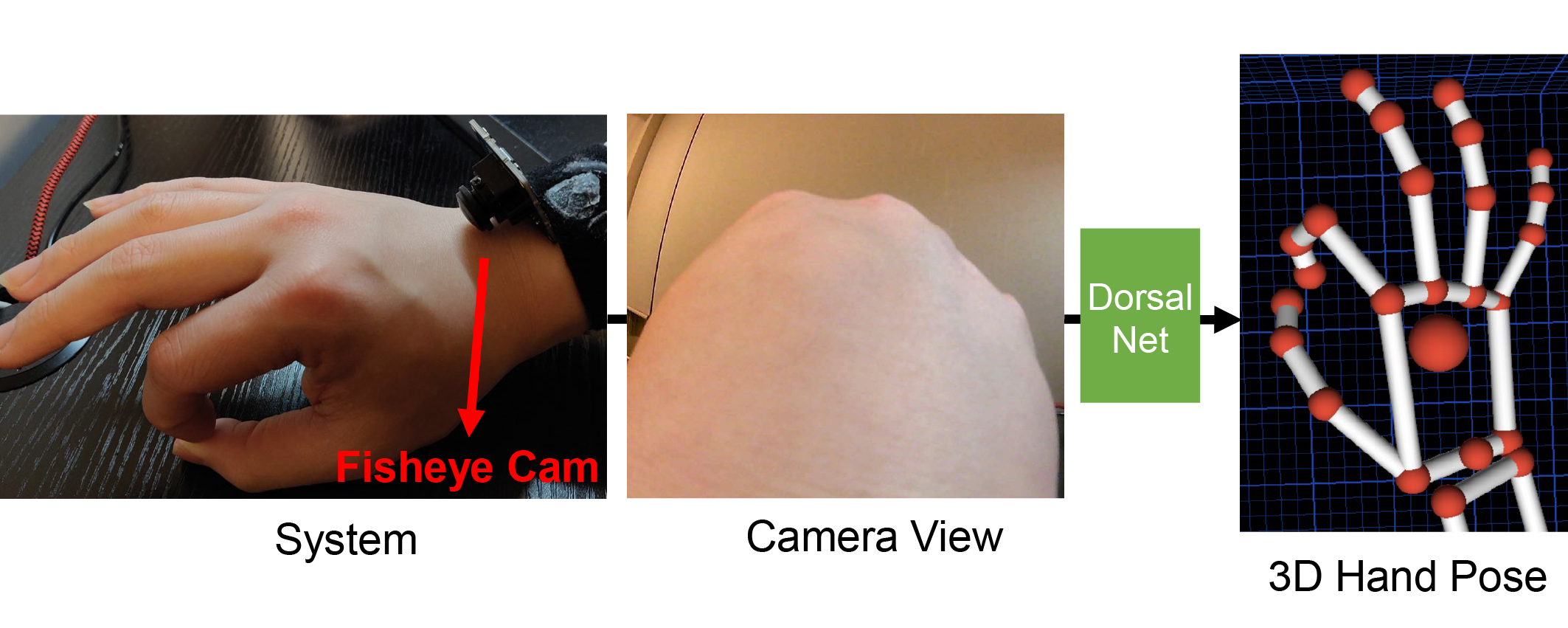
Back-Hand-Pose: 3D Hand Pose Estimation for a Wrist-worn Camera via Dorsum Deformation Network
Erwin Wu ,
Ye Yuan ,
Hui-Shyong Yeo ,
Aaron Quigley ,
Hideki Koike ,
Kris Kitani
ACM Symposium on User Interface Software and Technology (UIST) , 2020
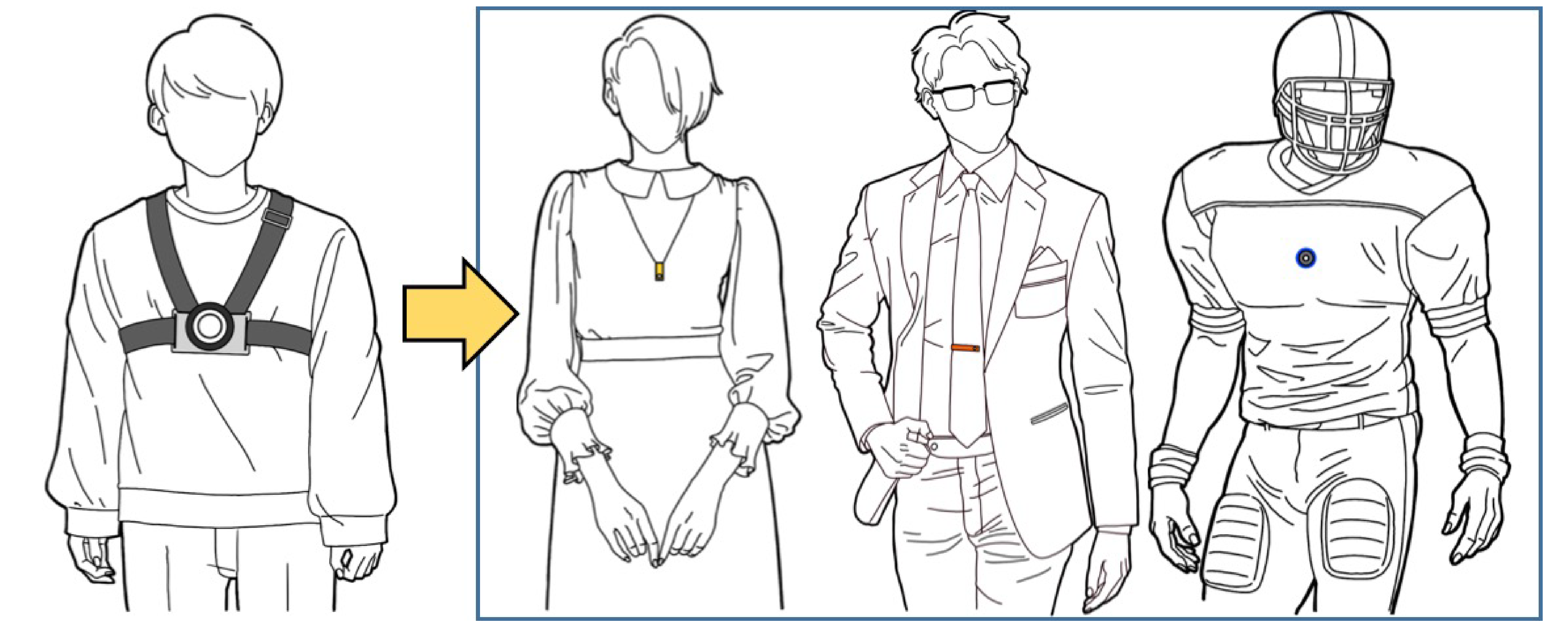
MonoEye: Multimodal Human Motion Capture System Using A Single Ultra-Wide Fisheye Camera
Dong-Hyun Hwang ,
Kohei Aso ,
Ye Yuan ,
Kris Kitani ,
Hideki Koike
ACM Symposium on User Interface Software and Technology (UIST) , 2020
Your browser does not support the video tag.
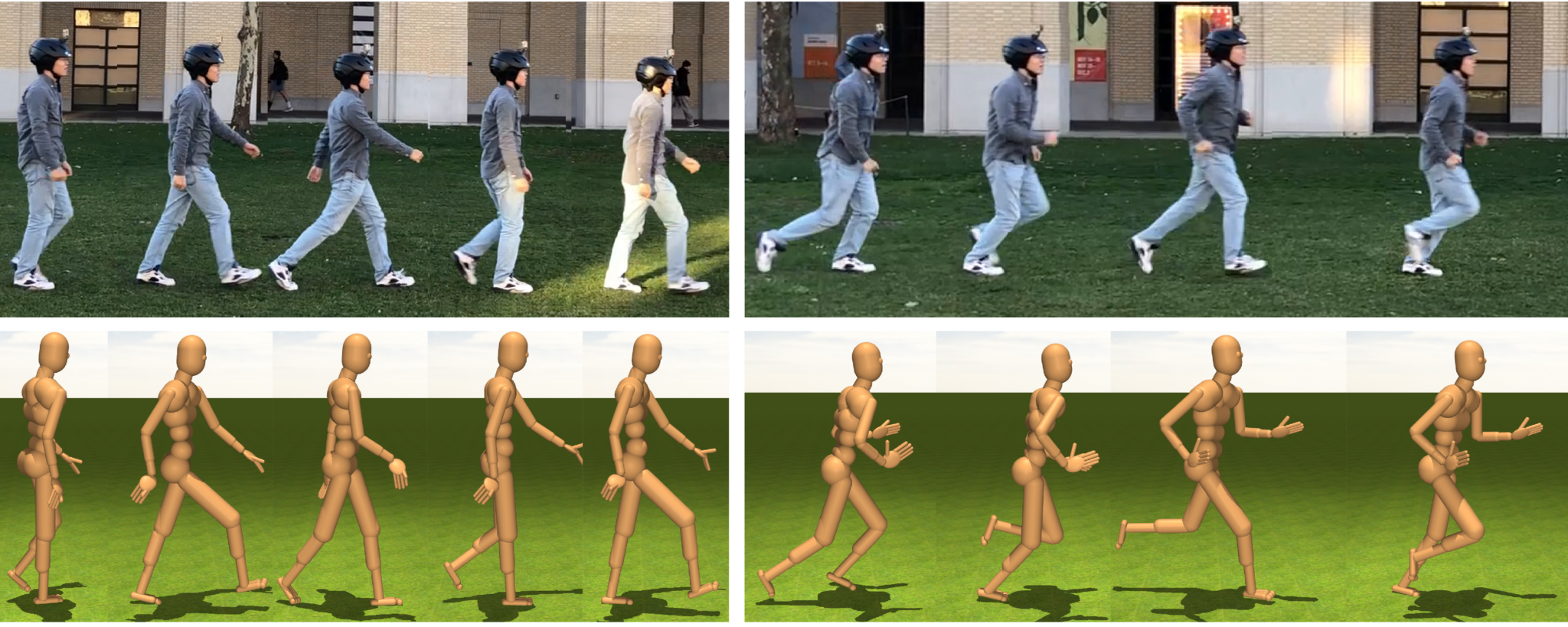
Ego-Pose Estimation and Forecasting as Real-Time PD Control
Ye Yuan ,
Kris Kitani
ICCV , 2019
3D Ego-Pose Estimation via Imitation Learning
Ye Yuan ,
Kris Kitani
ECCV , 2018
Your browser does not support the video tag.
Computational Design of Transformables
Ye Yuan ,
Changxi Zheng ,
Stelian Coros
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA) , 2018
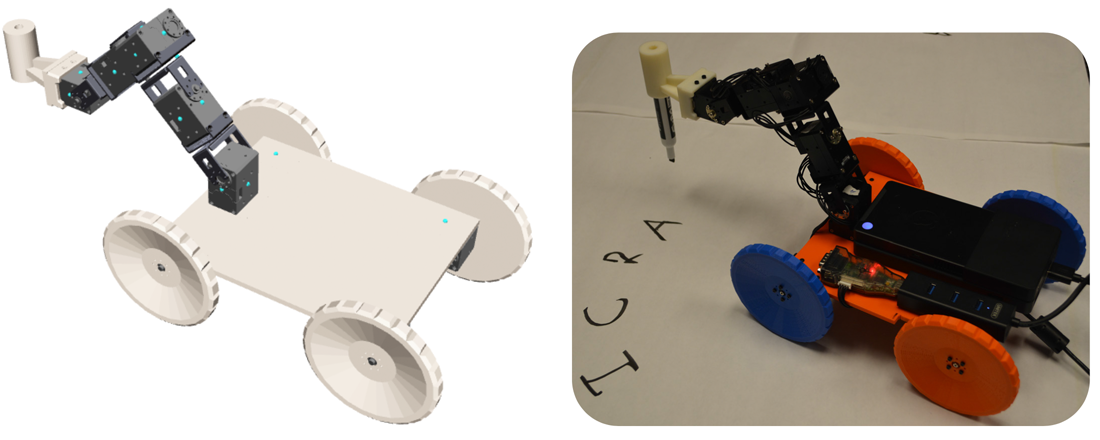
Computational Abstractions for Interactive Design of Robotic Devices
Ruta Desai ,
Ye Yuan ,
Stelian Coros
ICRA , 2017
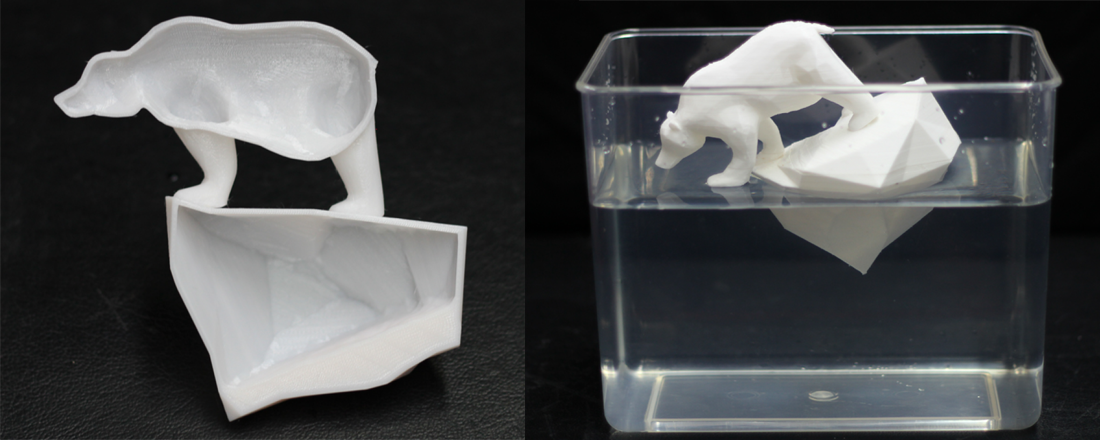
Continuous Optimization of Interior Carving in 3D Fabrication
Ye Yuan ,
Xiang Chen ,
Changxi Zheng ,
Kun Zhou
Frontiers of Computer Science , 2017
Area Chair
CVPR
Conference Reviewer
NeurIPS, ICML, ICLR, CVPR, ICCV, ECCV, AAAI, ICRA, SIGGRAPH, Eurographics
Journal Reviewer
JMLR, TMLR, TPAMI, TIP, RA-L